Edge Detector 3D
1 개요
3D Object의 포인트 클라우드 별 곡률을 계산하여 Sharp Feature(Edge)인지 판단하는 알고리즘입니다.
2 알고리즘 상세 설명
| Source Point Cloud | Result Point Cloud |
|---|---|
 |
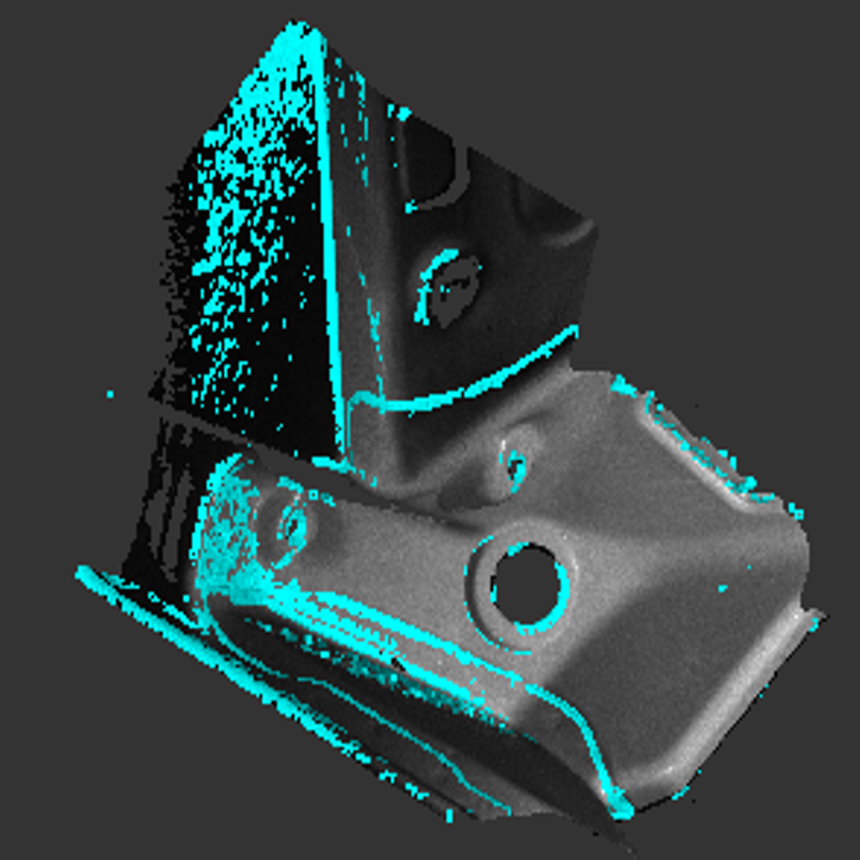 |
Fig. Edge Detector 3D 동작 실행
3 파라미터 설정 및 사용 방법
-
SetEdgeThreshold(float f32Threshold)- 엣지 검출 임계 값을 설정합니다.
- Default Value : 0.01
- Recommended Value : 0.001 ~ 0.1
-
SetNearestNeighborCount(int32_t i32Count)- 탐색할 이웃 점들의 수를 설정합니다.
- Default Value : 32
- Recommended Value : 10 ~ 100
4 예제 코드
CEdgeDetector3D EdgeDetector3D;
CFL3DObject floSourceObjectData;
floSourceObjectData.Load(L"C:\\Users\\Public\\Documents\\FLImaging\\ExampleImages\\EdgeDetector3D\\Sample.ply");
EdgeDetector3D.SetSourceObject(floSourceObjectData);
EdgeDetector3D.SetEdgeThreshold(0.001);
EdgeDetector3D.Execute();