Hand Eye Calibrator 3D
1 개요
Robot End Effector와 Camera 간의 변환 행렬을 추정하는 알고리즘입니다.
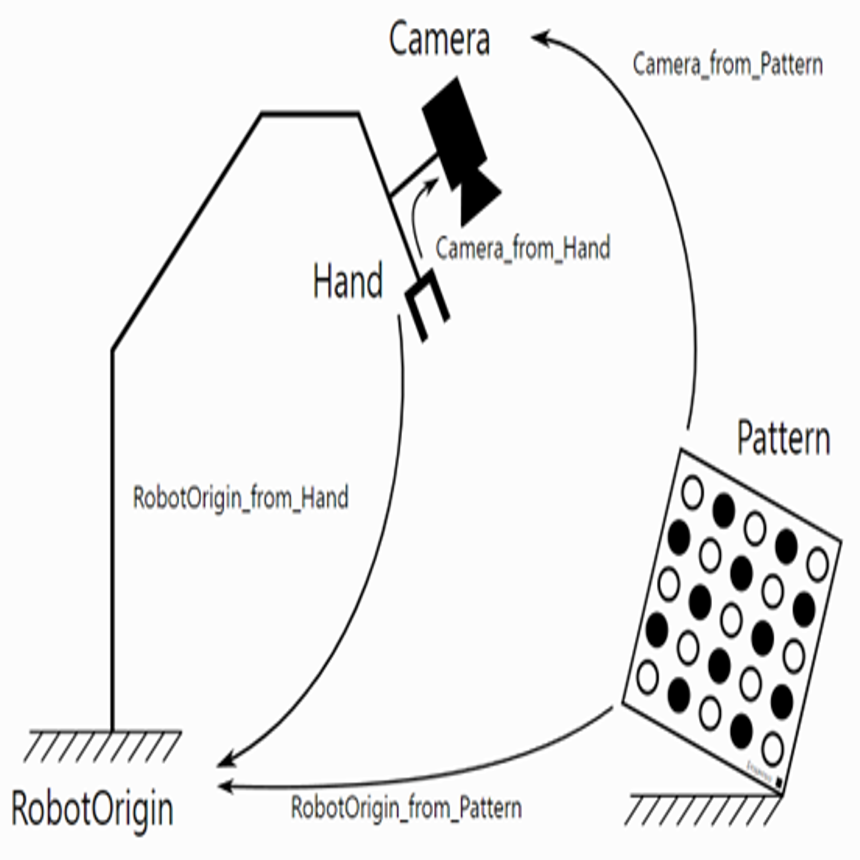
위 결과는 Eye_In_Hand 상황의 Camera_from_Hand에 해당합니다.
2 알고리즘 상세 설명
| Calibration Object | Hand Eye Calibration Result |
|---|---|
 |
 |
-
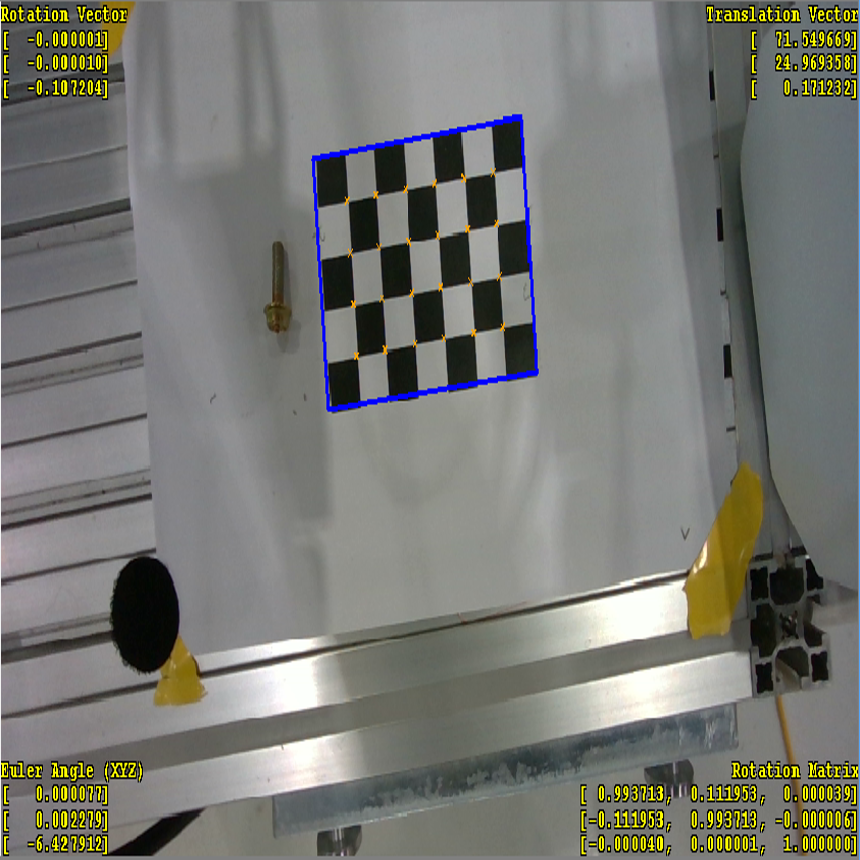
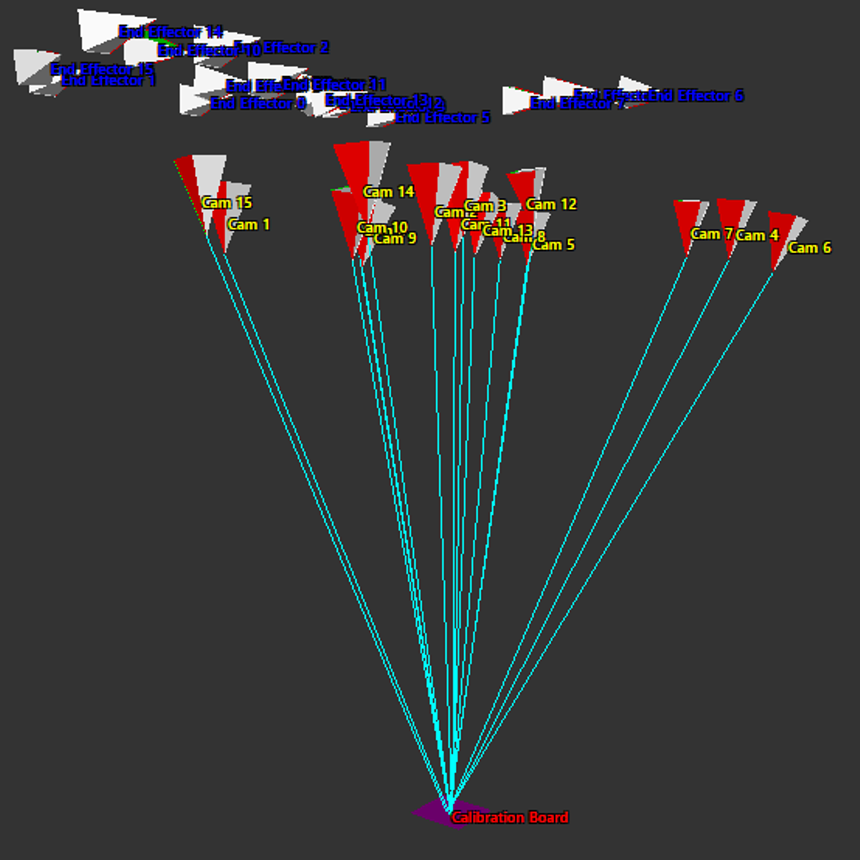
위 사진의 Calibration Object는 Robot End Effector에 부착된 카메라에서 촬영된 이미지이며, 오른쪽 Hand Eye Calibration Result의 End Effector는 Calibration Object가 촬영된 시점의 Robot Base 좌표입니다. Chess Board 이미지에서 카메라 외부 행렬을 계산하기 위해서 Camera Pose 3D 알고리즘을 수행해야 합니다.
-
오른쪽 사진과 같이 End Effector 에서 Camera, Camera에서 Calibration Board로 변환한 결과를 확인하였을 때 높은 정확도로 변환 행렬을 추정하는 것을 알 수 있습니다.
-
알고리즘은 아래 두 상황에 사용 할 수 있습니다.
- Eye In Hand : 카메라가 로봇에 부착.
- Calibration Object가 지면 등에 고정 된 환경에서 이미지-로봇 포즈를 취득합니다.
- Eye To Hand : 카메라가 로봇 외부에 고정.
- Calibration Object가 로봇에 부착된 환경에서 이미지-로봇 포즈를 취득합니다.
- n번의 카메라 취득 -> 로봇 포즈 기록 데이터를 사용하여 캘리브레이션 합니다.
- 10개 이상의 데이터 쌍을 권장하며, 각 로봇 포즈는 다양한 각도(회전 축 기준 최소 15도 이상이 유의미한 차이) 및 이동(Calibration Object가 FOV를 넘지 않는 것을 기준으로 함)이 있어야 높은 정확도의 결과를 얻을 수 있습니다.
- Eye In Hand : 카메라가 로봇에 부착.
3 파라미터 설정 및 사용 방법
Calibration을 위한 Camera 내부 파라미터 설정 방법은 Camera Pose 3D와 동일합니다.
-
SetOptimizationMethod(EOptimizationMethod eMethod)- EOptimizationMethod_Linear : 선형 방법으로 AX=XB에 대한 Closed Form을 계산합니다.
- EOptimizationMethod_Nonlinear : 비선형 방법으로 캘리브레이션하며, AX=XB 오차를 최소화 합니다.
- EOptimizationMethod_Linear_ReprojectionBased : 선형 방법으로 캘리브레이션 된 결과를 초기 행렬로 사용하여 AX=ZB 오차를 최소화 합니다.
- EOptimizationMethod_Nonlinear_ReprojectionBased : 비선형 방법으로 캘리브레이션 된 AX=XB결과를 초기 행렬로 사용하여 AX=ZB 오차를 최소화 합니다.
-
SetScaleFactor(double f64ScaleFactor)- 설정한 End Effector의 축척 값을 설정합니다.
- 캘리브레이션 보드가 촬영된 이미지가 설정되어 캘리브레이션이 동작하는 경우 축척은 아래 기준을 따릅니다.
- 알고리즘 내부적으로 설정된 Camera Pose의 기본 단위는 meter 단위입니다.
- End Effector의 축척이 millimeter일 경우 Scale Factor는 0.001을 설정해야합니다.
- 이미지가 설정되지 않았으며, 계산된 Camera Pose가 직접 입력되는 경우 축척은 Camera Pose를 기준으로 합니다.
- Camera Pose가 millimeter 단위이며, End Effector가 meter 단위인 경우 Scale Factor는 1000을 설정해야합니다.
- f64ScaleFactor : 축척
-
SetResultScaleFactor(double f64ScaleFactor)- 결과 Translation의 축척을 변경합니다.
- 결과 Translation이 Millimeter일 때 원하는 축척이 meter 단위일 경우 0.001을 설정해야합니다.
- f64ScaleFactor : 축척
-
SetCalibrationCameraMatrix(CFLPoint<double> flpPrincipalPoint, CFLPoint<double> flpFocalLength)- 카메라 내부 파라미터를 설정합니다.
- flpFocalLength, flpPrincipalPoint : 카메라의 초점 거리 및 주점
-
SetCalibrationDistortionCoefficient(CFLArray<double> flaDistortionCoeff)- 카메라 왜곡 계수를 설정합니다.
- flaDistortionCoeff : 카메라 왜곡 계수
-
SetCalibrationBoardCellPitch(CFLPoint<double> flpBoardCellPitch)- 캘리브레이션 보드의 셀 간격을 설정합니다.
- flpBoardCellPitch : 캘리브레이션 보드의 셀 간격
카메라 외부 행렬 설정 방법
- Camera 행렬은 촬영된 이미지, 혹은 이미 계산된 카메라 외부 행렬로 설정할 수 있습니다.
- 촬영된 이미지로 설정하는 방법
SetSourceImage(CFLImage fliImage)
- 이미 계산된 카메라 외부 행렬로 설정하는 방법
SetCalibrationCameraCoordinateTranslation(CFLArray<TPoint3<double>> flaCameraTranslation)- 카메라 이동 벡터 배열을 설정합니다.
SetCalibrationCameraCoordinateAngle(CFLArray<TPoint3<double>> flaCameraAngle)- 카메라 회전 벡터 혹은 각도 배열을 설정합니다.
- 촬영된 이미지로 설정하는 방법
엔드 이펙터 설정 방법
-
Robot Base End Effector의 Pose를 설정하기 위해 아래와 같은 함수를 사용할 수 있습니다.
SetCalibrationEndEffectorCoordinateTranslation(CFLArray<TPoint3<double>> flaEndEffectorTranslation)- End Effector의 이동 벡터 배열을 설정합니다.
SetCalibrationEndEffectorCoordinateAngle(CFLArray<TPoint3<double>> flaEndEffectorAngle)- End Effector의 회전 벡터 혹은 각도 배열을 설정합니다.
-
(.csv, .txt) 포맷으로 저장된 데이터를 불러올 수 있습니다.
LoadEndEffectorPose(CFLString<wchar_t> flsFileName)- 아래와 같은 포맷을 준수해야합니다.
-
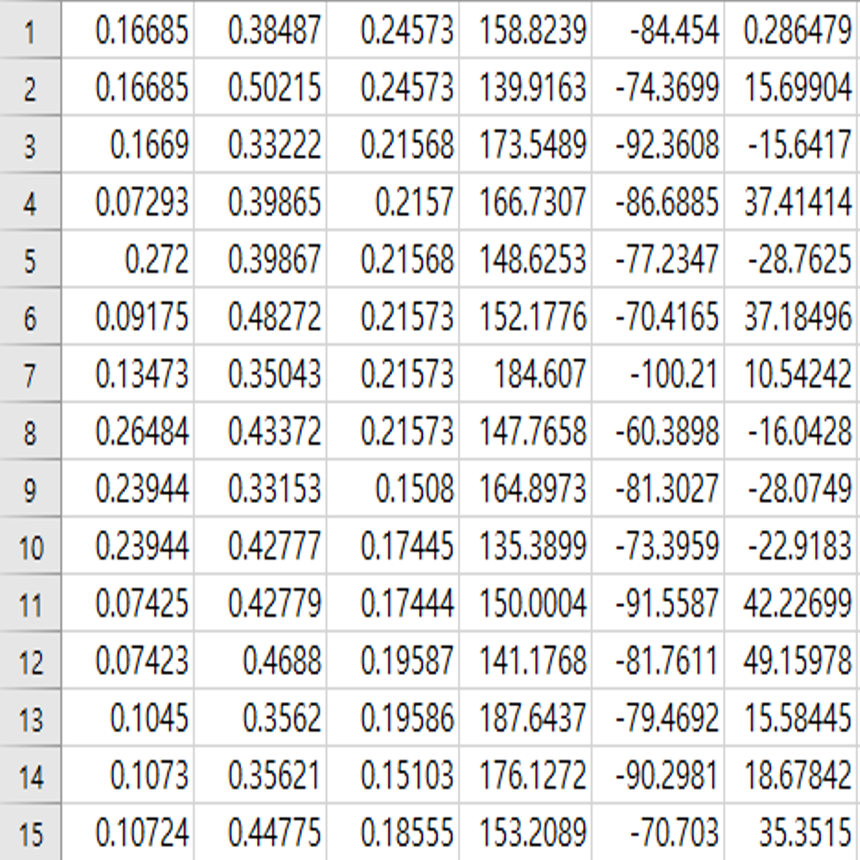
Fig. Robot End Effector 포맷(Tx, Ty, Tz, Rx, Ry, Rz) -
End Effector의 각도 단위, 회전 타입을 설정해야합니다.
SetRotationType(ERotationType eType)- ERotationType_RotationVector
- 회전 벡터 타입입니다.
- ERotationType_EulerAngle
- 회전 각도 타입입니다.
- Euler Sequence를 함께 설정해야 하며 표기는 아래와 같습니다.
- Ext_XYZ : X->Y->Z or Static XYZ(sxyz) or WPR/RPY(yaw, pitch, roll)
- Int_XYZ : Z->Y`->X`` or Rotated XYZ(rxyz)
- ERotationType_RotationVector
SetEndEffectorAngleUnit(ImageProcessing::EAngleUnit eType)- EAngleUnit_Degree
- EAngleUnit_Radian
-
SetCalibrationMode(ECalibrationMode eMode)- Calibration Type을 설정합니다.
- ECalibrationMode_EyeInHand : Eye in hand 상황에 적합합니다. End Effector에 Camera가 부착된 경우 사용합니다.
- ECalibrationMode_EyeToHand : Eye to hand 상황에 적합합니다. Camera가 고정된 위치에 있는 경우 사용합니다.
- Calibration Type을 설정합니다.
4.알고리즘 수행 결과 취득 방법
-
GetResultHandToEyeRotationVector(CFLArray<double> flaResultRotationVector)- 결과 회전 벡터를 얻어옵니다.
- End Effector -> Camera 결과를 반환합니다.
-
GetResultHandToEyeTranslationVector(CFLArray<double> flaResultTranslationVector)- 결과 이동 벡터를 얻어옵니다.
- End Effector -> Camera 결과를 반환합니다.
-
GetResultHandToEyeRotationMatrix(CMatrix<double> matResultRotationMatrix)- 결과 회전 행렬을 얻어옵니다.
- End Effector -> Camera 결과를 반환합니다.
-
GetResultHandToEyeEulerAngle(CFLArray<double> flaResultEulerAngle)- 결과 회전 각도를 얻어옵니다.
- End Effector -> Camera 결과를 반환합니다.
-
GetResultHandToEyeTransformationMatrix(CMatrix<double> matResultTransformationMatrix)- 결과 변환 행렬을 얻어옵니다.
- End Effector -> Camera 결과를 반환합니다.
-
GetResultEyeToHandRotationVector(CFLArray<double> flaResultRotationVector)- 결과 회전 벡터를 얻어옵니다.
- Camera -> End Effector 결과를 반환합니다.
-
GetResultEyeToHandTranslationVector(CFLArray<double> flaResultTranslationVector)- 결과 이동 벡터를 얻어옵니다.
- Camera -> End Effector 결과를 반환합니다.
-
GetResultEyeToHandRotationMatrix(CMatrix<double> matResultRotationMatrix)- 결과 회전 행렬을 얻어옵니다.
- Camera -> End Effector 결과를 반환합니다.
-
GetResultEyeToHandEulerAngle(CFLArray<double> flaResultEulerAngle)- 결과 회전 각도를 얻어옵니다.
- Camera -> End Effector 결과를 반환합니다.
-
GetResultEyeToHandTransformationMatrix(CMatrix<double> matResultTransformationMatrix)- 결과 변환 행렬을 얻어옵니다.
- Camera -> End Effector 결과를 반환합니다.
5 좌표계 변환 방법
-
Eye In Hand
- Robot Base 좌표계 상의 End Effector 6D Pose 와 Camera 좌표계 상의 6D Pose를 설정해야합니다.
- 변환 결과는 아래와 같습니다.
- T_Base2Object = T_Base2EE * T_EE2Cam * T_Cam2Object
- T_EE2Cam : 알고리즘 수행 결과
- T_Base2EE : End Effector 6D Pose
- T_Cam2Object : Camera 좌표계 상의 6D Pose
- T_Base2Object = T_Base2EE * T_EE2Cam * T_Cam2Object
- End Effector 6D Pose는 아래 API로 설정할 수 있습니다.
SetConvertingEndEffectorPoseMatrix()- 첫 번째 인자 : Translation Vector
- 두 번째 인자 : Rotation
- Rotation 설정은 여러 방법으로 할 수 있습니다. 오일러 각도 혹은 회전 벡터 타입은 End Effector의 회전 타입에 종속됩니다.
- Euler Angle :
TPoint3<double> - Rotation Vector :
TPoint3<double> - 임의의 평면 :
CFLQuad3<double> - 입력된 정점 데이터에서 추정 :
CFLArray<TPoint3<float>>
- Euler Angle :
- Rotation 설정은 여러 방법으로 할 수 있습니다. 오일러 각도 혹은 회전 벡터 타입은 End Effector의 회전 타입에 종속됩니다.
- Camera 좌표계 상의 6D Pose는 아래 API로 설정할 수 있습니다.
SetConvertingCameraPoseMatrix()- 첫 번째 인자 : Translation Vector
- 두 번째 인자 : Rotation
- Rotation 설정은 여러 방법으로 할 수 있습니다. 오일러 각도 혹은 회전 벡터 타입은 End Effector의 회전 타입에 종속됩니다.
- Euler Angle :
TPoint3<double> - Rotation Vector :
TPoint3<double> - 임의의 평면 :
CFLQuad3<double> - 입력된 정점 데이터에서 추정 :
CFLArray<TPoint3<float>>
- Euler Angle :
- Rotation 설정은 여러 방법으로 할 수 있습니다. 오일러 각도 혹은 회전 벡터 타입은 End Effector의 회전 타입에 종속됩니다.
-
Eye To Hand
- Camera 좌표계 상의 6D Pose를 설정해야합니다.
- 변환 결과는 아래와 같습니다.
- T_Base2Object = T_Base2Cam * T_Cam2Object
- T_Base2Cam : 알고리즘 수행 결과
- T_Cam2Object : Camera 좌표계 상의 6D Pose
- Camera 좌표계 상의 6D Pose 설정 방법은 Eye In Hand와 동일합니다.
- T_Base2Object = T_Base2Cam * T_Cam2Object
-
캘리브레이션 결과를 사용하였을 때 타겟 지점에 대해 오차가 발생한다면 다음과 같이 오프셋 설정을 할 수 있습니다.
SetConvertingPoseOffsetMatrix(CMatrix<double>& matPoseOffset)- 4x4 Rigid Transformation Matrix를 입력으로 오프셋 설정.
SetConvertingPoseOffsetMatrix(TPoint3<double>& tp3Translation, TPoint3<double>& tp3Angle)- tp3Translation : 캘리브레이션 결과와 동일한 축척을 가져야합니다.
- tp3Angle : 캘리브레이션 시 설정한 Rotation Type, Angle Unit, Euler Sequence와 동일하게 설정해야합니다.
SetCoordinateConvertingMethod(ECoordinateConvertingMethod eMethod)- ECoordinateConvertingMethod_WithCameraOffset : Camera 기준의 Offset을 설정합니다. Local 좌표계(Tool, TCP)의 축 방향대로 Translation Offset이 적용됩니다.
- ECoordinateConvertingMethod_WithBaseOffset : Base 기준의 Offset을 설정합니다. World 좌표계(Robot Base)의 축 방향대로 Translation Offset이 적용됩니다.
-
설정 후
Execute()실행 시 Robot Base 좌표계로 변환된 결과를 얻을 수 있으며, 변환 결과는 아래 API를 사용해 얻을 수 있습니다.GetConvertingResultPoseMatrix(TPoint3<double>& tp3Translation, TPoint3<double>& tp3Angle)- tp3Angle : End Effector의 회전 타입에 종속된 결과입니다.
GetConvertingResultPoseMatrix(CMatrix<double>& matResult)
6 예제 코드
CHandEyeCalibrator3D HandEyeCalibrator3D;
CFLImage fliSourceImage;
fliSourceImage.Load(L"C:/Users/Public/Documents/FLImaging/ExampleImages/HandEyeCalibrator3D/ChessBoard.flif");
HandEyeCalibrator3D.SetSourceImage(fliSourceImage);
HandEyeCalibrator3D.LoadEndEffectorPose(L"C:/Users/Public/Documents/FLImaging/ExampleImages/HandEyeCalibrator3D/EndEffectorPose.csv"); // End Effector 포즈 불러오기
HandEyeCalibrator3D.SetCalibrationObjectType(ThreeDim::ECalibrationObjectType::ECalibrationObjectType_ChessBoard); // 캘리브레이션 객체 타입을 체스 보드로 설정
HandEyeCalibrator3D.SetRotationType(ThreeDim::CHandEyeCalibrator3D::ERotationType_RotationVector); // End Effector 회전 타입 설정
HandEyeCalibrator3D.SetOptimizationMethod(ThreeDim::CHandEyeCalibrator3D::EOptimizationMethod::EOptimizationMethod_Nonlinear); // 최적화 방법 설정
HandEyeCalibrator3D.SetEndEffectorAngleUnit(ImageProcessing::EAngleUnit::EAngleUnit_Radian); // End Effector 회전 각도 단위 설정
// 오일러 각 회전 순서
// SetRotationType(CHandEyeCalibrator3D::ERotationType_EulerAngle)시 설정
HandEyeCalibrator3D.SetEulerSequence(Foundation::EEulerSequence::EEulerSequence_Extrinsic_XYZ);
HandEyeCalibrator3D.SetScaleFactor(1.000000); // End Effector Scale Factor 설정
HandEyeCalibrator3D.SetResultScaleFactor(1.000000); // 결과 Scale Factor 설정
HandEyeCalibrator3D.SetOptimalSolutionAccuracy(0.000001); // 최적화 정확도 설정
CFLArray<double> flaDistortionCoef;
flaDistortionCoef.PushBack(-0.053853);
flaDistortionCoef.PushBack(0.059036);
flaDistortionCoef.PushBack(0.000375);
flaDistortionCoef.PushBack(0.000786);
flaDistortionCoef.PushBack(-0.018948);
HandEyeCalibrator3D.SetCalibrationDistortionCoefficient(flaDistortionCoef); 왜곡 계수 설정
CFLPoint<double> flpFocalLength;
CFLPoint<double> flpPrincipalPoint;
flpFocalLength.x = 428.668823;
flpFocalLength.y = 428.268188;
flpPrincipalPoint.x = 422.934998;
flpPrincipalPoint.y = 240.188660;
HandEyeCalibrator3D.SetCalibrationCameraMatrix(flpFocalLength, flpPrincipalPoint); // 카메라 내부 행렬 설정
HandEyeCalibrator3D.SetCalibrationBoardCellPitch(15.000000, 15.000000); // 체스 보드 셀 간격 설정
HandEyeCalibrator3D.Calibrate();